
# 树莓派小车实验报告
# 1 小车构造及环境配置
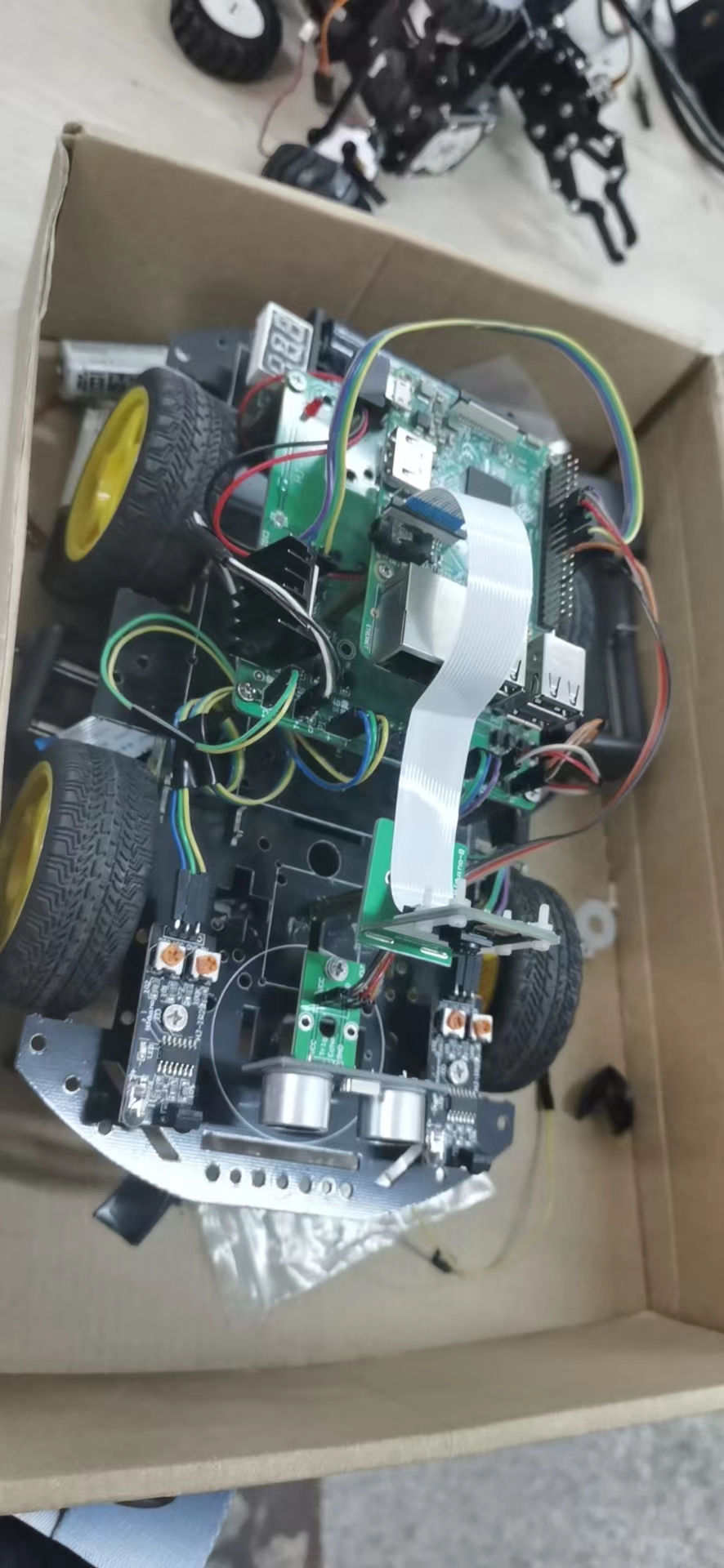
## 1.1 硬件搭建
* 树莓派3B
* 两个PWM电机
* 两个红外传感器
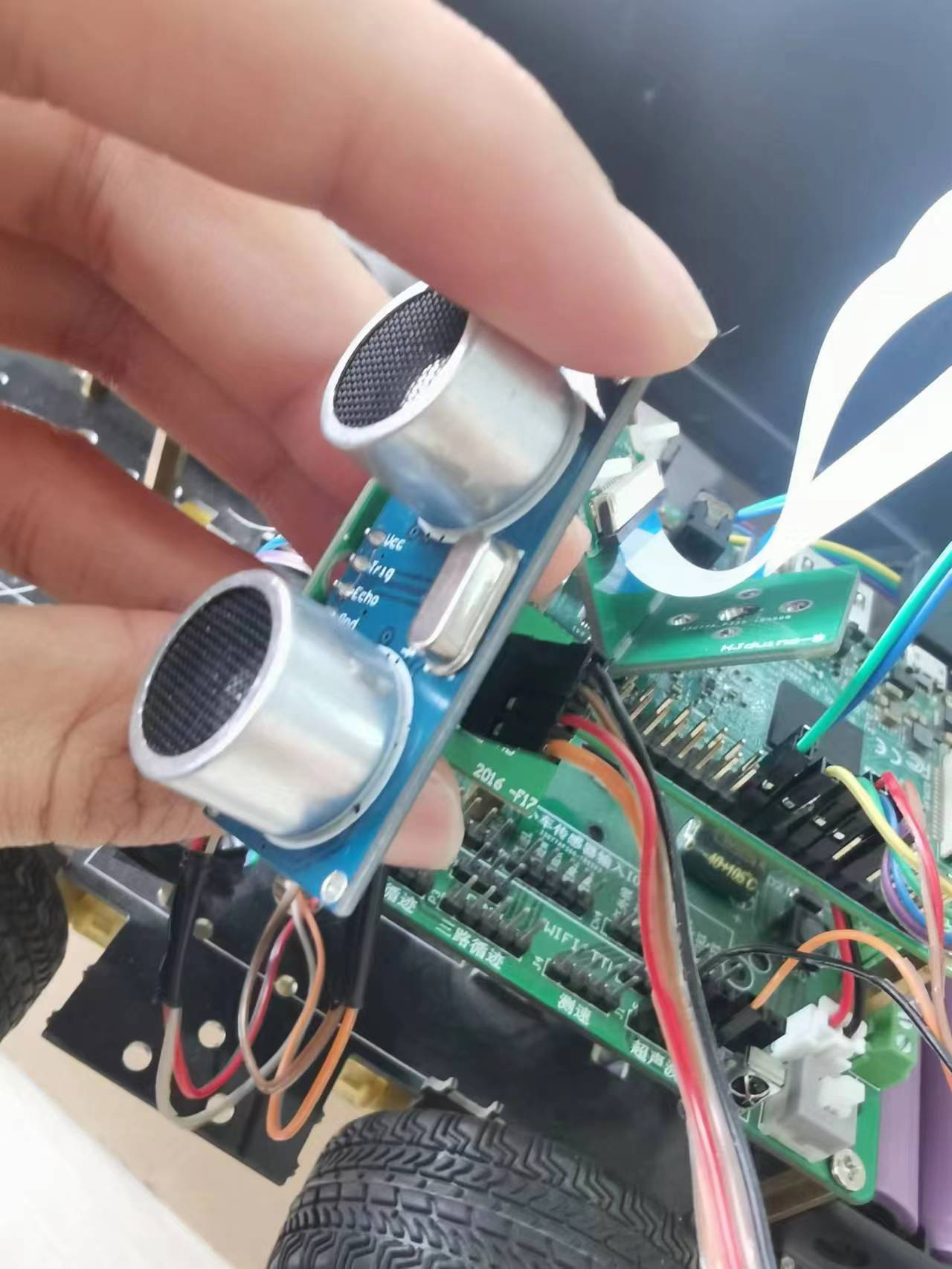
* 一个超声波传感器
* 一个单目摄像头
## 1.2 系统烧录
1. 使用`树莓派镜像烧录器`
``下载直达 https://downloads.raspberrypi.org/imager/imager_latest.exe``
> 优点:
>
> 1. 可以直接在设置中配置网络环境
> 2. 可以选择多种操作系统
* 操作步骤:
* 下载镜像https://downloads.raspberrypi.org/raspios_arm64/images/raspios_arm64-2022-09-26/2022-09-22-raspios-bullseye-arm64.img.xz
* 选择自定义镜像
* 设置ssh和wifi
## 1.3 raspberry PI环境搭配
1. 首先对树莓派进行换源
```powershell
* pi@raspberrypi:~ $ sudo nano /etc/apt/sources.list
deb https://mirror.nju.edu.cn/debian/ bullseye main contrib non-free
deb https://mirror.nju.edu.cn/debian-security/ bullseye-security main contrib non-free
deb https://mirror.nju.edu.cn/debian bullseye-updates main contrib non-free
* pi@raspberrypi:~ $ sudo nano /etc/apt/sources.list.d/raspi.list
deb https://mirror.nju.edu.cn/raspberrypi/debian/ bullseye main
```
2. 更新
```powershell
sudo apt-get update
sudo apt-get upgrade
```
3. 安装OPENCV
```powershell
sudo apt-get install python3-opencv
```
4. 配置摄像头选项
```powershell
sudo raspi-config
```
找到Interface Options --> Camera -->打开摄像头YES
(可以在终端中查看device0是否存在)
## 1.4 PC端配置
1. VS code连接Raspberry Pi
配置SSH文件
```
#Read more about SSH config files: https://linux.die.net/man/5/ssh_config
Host copy # PC名称,随便起
HostName 192.168.43.162 # 树莓派地址,可以使用IP Scanner查看
User pi # 树莓派名称,在烧录SD卡的时候配置
Port 22 # 默认22
```
*几点注意事项*:
> > HostName可以使用IP Scanner,如果是连接安卓手机可以通过手机热点直接查看,苹果手机不管是IP Scanner还是手机热点都看不了
>
>
>
> > 改这个SSH会造成连不上GitHub的情况,如果想要重新连接GitHub,必须将上面注释,该车下面
> >
> > ```
> > Host github.com
> > Hostname ssh.github.com
> > Port 443
> > ```
2. 下载VNC Viewer
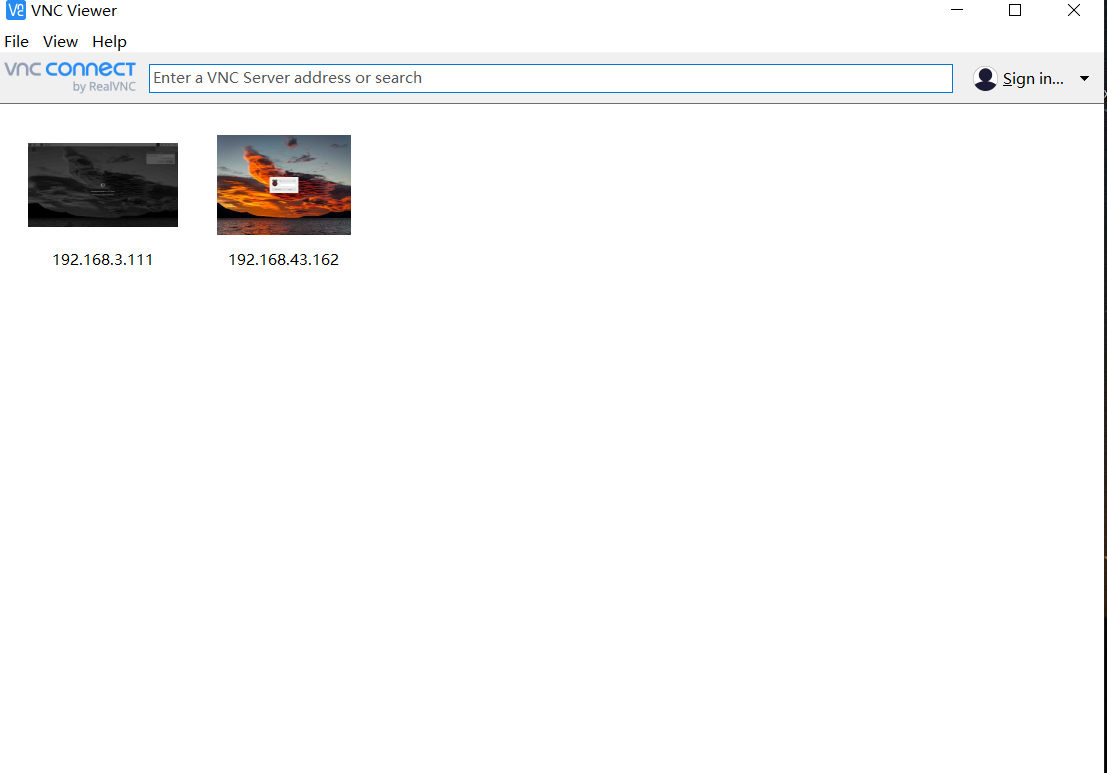
连接方式也是通过SSH连接到小车地址
## 1.5 引脚分配

```python
# 设置gpio口为BOARD编号规范
gpio.setmode(gpio.BOARD)
# 定义引脚
# 电机
pin1 = 12 # 左正
pin2 = 16 # 左反
pin3 = 18 # 右正
pin4 = 22 # 右反
ENA = 38 # 左边电机使能
ENB = 40 # 右边电机使能
# 超声波
TRIG = 13 # send-pin
ECHO = 15 # receive-pin
# 红外线
GPIO_Infrared_left = 29 # 左边红外线
GPIO_Infrared_right = 31 # 右边红外线
```
# 2 八字循迹
## 1.1 电机控制
```python
def car_forward(): # 定义前进函数
gpio.output(pin1, gpio.HIGH) # 将pin1接口设置为高电压
gpio.output(pin2, gpio.LOW) # 将pin2接口设置为低电压
gpio.output(pin3, gpio.HIGH) # 将pin3接口设置为高电压
gpio.output(pin4, gpio.LOW) # 将pin4接口设置为低电压
def car_back(): # 定义后退函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_left(): # 定义左转函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.HIGH)
gpio.output(pin4, gpio.LOW)
def car_right(): # 定义右转函数
gpio.output(pin1, gpio.HIGH)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_stop(): # 定义停止函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.LOW)
```
## 1.2 图像捕捉与处理
### 1.2.1 摄像头处理
```python
# 打开摄像头,图像尺寸640*480(长*高)
cap = cv2.VideoCapture(0)
# 设置捕捉到的图像为480*640
cap.set(3, 640)
cap.set(4, 480)
```
### 1.2.2 图像处理
```python
import time
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
cap.set(3, 640)
cap.set(4, 480)
while (1):
ret, frame = cap.read()
cv2.imshow('frame', dst) # 展示每一帧
# 转化为灰度图
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
cv2.imshow('gray', gray) # 展示灰度图
# 大津法二值化
retval, dst = cv2.threshold(gray, 100, 255, cv2.THRESH_OTSU)
# 膨胀,白区域变大
dst = cv2.dilate(dst, None, iterations=2)
cv2.imshow('dilate_frame', dst) # 展示每一帧
# 腐蚀,白区域变小
dst = cv2.erode(dst, None, iterations=6)
cv2.imshow('erode_frame', dst) # 展示每一帧
# 找到连续白色像素点最宽的那条
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放清理
cap.release()
cv2.destroyAllWindows()
```
**代码讲解**
> ```python
> ret, frame = cap.read()
> cv2.imshow('frame', dst)
> ```
>
>

> ```python
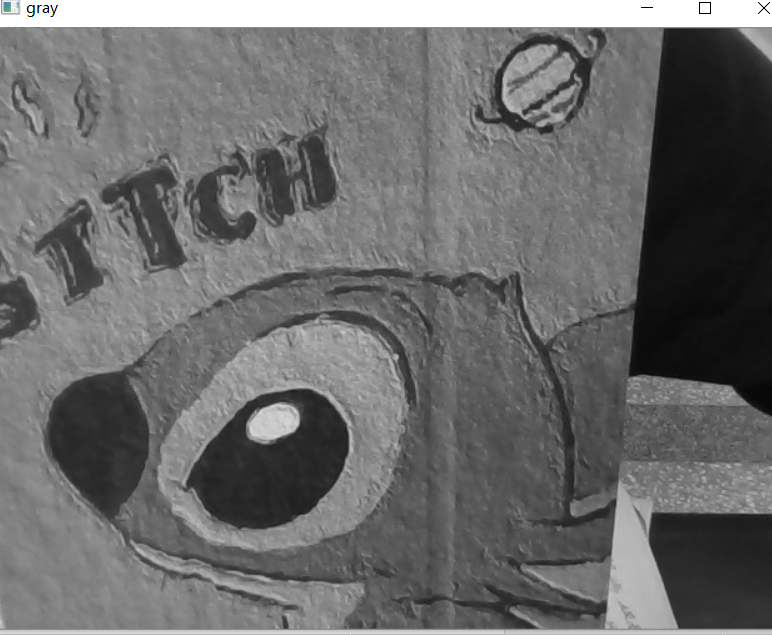
> gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
> cv2.imshow('gray', gray) # 展示灰度图
> ```
>
>
>
>
> 这里我们先是将图像进行二值化
>
> `retval, dst = cv2.threshold(gray, 100, 255, cv2.THRESH_OTSU)`
>
> 这个阈值取决于环境
>```python
># 膨胀,白区域变大
>dst = cv2.dilate(dst, None, iterations=2)
>cv2.imshow('dilate_frame', dst) # 展示每一帧
>```
>
>

>
>如果只对图像进行膨胀则在边界处提取不够明显!!
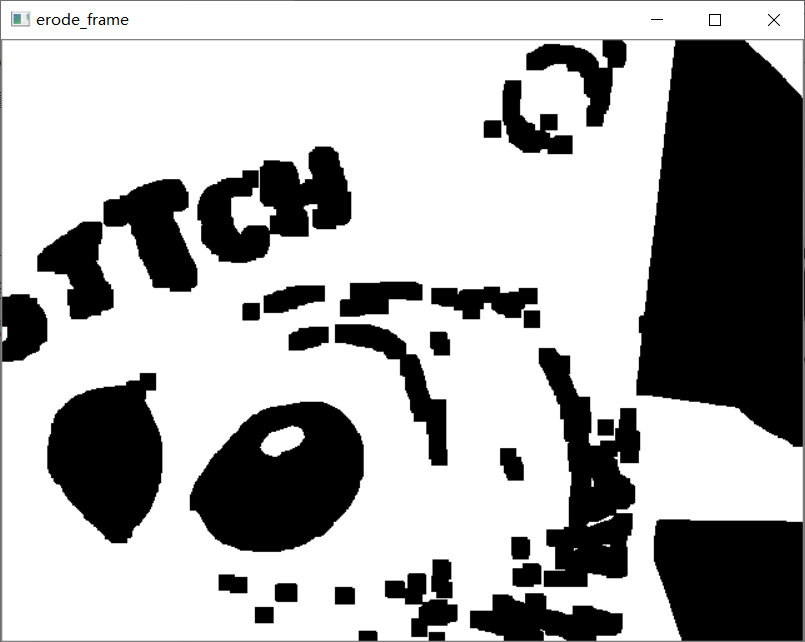
> ```python
> # 腐蚀,白区域变小
> dst = cv2.erode(dst, None, iterations=6)
> cv2.imshow('erode_frame', dst) # 展示每一帧
> ```
>
>

>
> 如果只对图像进行腐蚀则图像特征不明显!!!
> ```python
> # 膨胀,白区域变大
> dst = cv2.dilate(dst, None, iterations=2)
> cv2.imshow('dilate_frame', dst) # 展示每一帧
> # 腐蚀,白区域变小
> dst = cv2.erode(dst, None, iterations=6)
> cv2.imshow('erode_frame', dst) # 展示每一帧
> ```
>
>
### 1.2.3 结果展示
此处推荐先对图像进行高斯滤波

## 1.3 循迹策略
寻找第400行像素,找到最长的一段白色像素集合作为赛道,寻找赛道中点与320作为比较进行左右判断
```python
# 单看第400行的像素值
# print(dst.shape)
color = dst[400]
# 找到连续白色像素点最宽的那条
road_set = []
road_set_length = []
road = []
for i in range(len(color)):
if (i == 639):
road_set.append(road)
road_set_length.append(len(road))
break
if color[i] == 255 and color[i + 1] == 255:
road.append(i)
elif (len(road) > 20 and color[i + 1] != 255):
road_set.append(road)
road_set_length.append(len(road))
road = []
if (len(road_set_length) == 0):
center = 320
elif (len(road) == 0):
center = 320
else:
index_ = road_set_length.index(max(road_set_length))
road = road_set[index_]
center = (min(road) + max(road)) / 2
# 计算出center与标准中心点的偏移量
# 如果为正,应该左转
direction = center - 320
print(direction)
threshold = 90 #右转阈值
threshold_neg = -40 #左转阈值
if abs(direction) >= threshold:
# 右转
if direction > threshold:
car_forward()
pwm1.ChangeDutyCycle(25 + direction / 18)
pwm2.ChangeDutyCycle(0)
if(direction>120 and direction <150): time.sleep(0.3) elif(direction>= 150):
time.sleep(0.5)
# 左转
elif direction < threshold_neg:
car_forward()
pwm1.ChangeDutyCycle(0)
pwm2.ChangeDutyCycle(25 + abs(direction) / 12)
if(abs(direction)>120 and abs(direction)<150): time.sleep(0.3) elif(abs(direction)>=150):
time.sleep(0.5)
else:
car_forward()
pwm1.ChangeDutyCycle(20)
pwm2.ChangeDutyCycle(20)
```
## 1.4 结果展示
# 3 乒乓球跟踪
## 1.1 图像处理
``` python
import cv2
import numpy as np
# https://www.cnblogs.com/bjxqmy/p/12333022.html
# https://blog.csdn.net/weixin_44237705/article/details/109021812
import RPi.GPIO as gpio
import time
# 定义引脚
pin1 = 12 # 左正
pin2 = 16 # 左反
pin3 = 18 # 右正
pin4 = 22 # 右反
ENA = 38
ENB = 40
# 设置gpio口为BOARD编号规范
gpio.setmode(gpio.BOARD)
# 设置gpio口为输出
gpio.setup(pin1, gpio.OUT)
gpio.setup(pin2, gpio.OUT)
gpio.setup(pin3, gpio.OUT)
gpio.setup(pin4, gpio.OUT)
gpio.setup(ENA, gpio.OUT)
gpio.setup(ENB, gpio.OUT)
# 设置PWM波,频率为500Hz
pwm1 = gpio.PWM(ENA, 50)
pwm2 = gpio.PWM(ENB, 50)
pwm1.start(0)
pwm2.start(0)
def car_forward(): # 定义前进函数
gpio.output(pin1, gpio.HIGH) # 将pin1接口设置为高电压
gpio.output(pin2, gpio.LOW) # 将pin2接口设置为低电压
gpio.output(pin3, gpio.HIGH) # 将pin3接口设置为高电压
gpio.output(pin4, gpio.LOW) # 将pin4接口设置为低电压
def car_back(): # 定义后退函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_left(): # 定义左转函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.HIGH)
gpio.output(pin4, gpio.LOW)
def car_right(): # 定义右转函数
gpio.output(pin1, gpio.HIGH)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_stop(): # 定义停止函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.LOW)
def empty(a):
pass
def draw_direction(img, lx, ly, nx, ny):
dx = nx - lx
dy = ny - ly
if abs(dx) < 4 and abs(dy) < 4:
dx = 0
dy = 0
else:
r = (dx ** 2 + dy ** 2) ** 0.5
dx = int(dx / r * 40)
dy = int(dy / r * 40)
# print(dx, dy)
cv2.arrowedLine(img, (60, 100), (60 + dx, 100 + dy), (0, 255, 0), 2)
# print(nx-lx, ny-ly) # 噪声一般为+-1
# cv2.arrowedLine(img, (150, 150), (150+(nx-lx), 150+(ny-ly)), (0, 0, 255), 2, 0, 0, 0.2)
def Hough_circle(imgGray, canvas):
# 基于霍夫圆检测找圆,包含了必要的模糊步骤
# 在imgGray中查找圆,在canvas中绘制结果
# canvas必须是shape为[x, y, 3]的图片
global Hough_x, Hough_y
img = cv2.medianBlur(imgGray, 3)
img = cv2.GaussianBlur(img, (17, 19), 0)
# cv2.imshow("Blur", img)
# cv2.waitKey(30)
circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 200,
param1=20, param2=50, minRadius=30, maxRadius=70)
try:
# try语法保证在找到圆的前提下才进行绘制
circles = np.uint16(np.around(circles))
# print("circ:",circles)
# 经测试,circles为:[[[c0_x, c0_y, c0_r], [c1_x, c1_y, c1_r], ...]]
# 所以for i in circles[0, :]:中的i为每一个圆的xy坐标和半径
except:
pass
else:
for i in circles[0, :]:
# draw the outer circle
cv2.circle(canvas, (i[0], i[1]), i[2], (255, 100, 0), 2)
# draw the center of the circle
cv2.circle(canvas, (i[0], i[1]), 2, (0, 0, 255), 3)
Hough_x = i[0]
Hough_y = i[1]
frameWidth = 640
frameHeight = 480
cap = cv2.VideoCapture(0) # 0对应笔记本自带摄像头
cap.set(3, frameWidth) # set中,这里的3,下面的4和10是类似于功能号的东西,数字的值没有实际意义
cap.set(4, frameHeight)
cap.set(10, 80) # 设置亮度
pulse_ms = 30
standard_area = 7000 # 设置乒乓球的标准大小,如果area大于这个值就要退后,如果小于这个值就前进
# 调试用代码,用来产生控制滑条
# cv2.namedWindow("HSV")
# cv2.resizeWindow("HSV", 640, 300)
# cv2.createTrackbar("HUE Min", "HSV", 4, 179, empty)
# cv2.createTrackbar("SAT Min", "HSV", 180, 255, empty)
# cv2.createTrackbar("VALUE Min", "HSV", 156, 255, empty)
# cv2.createTrackbar("HUE Max", "HSV", 32, 179, empty)
# cv2.createTrackbar("SAT Max", "HSV", 255, 255, empty)
# cv2.createTrackbar("VALUE Max", "HSV", 255, 255, empty)
lower = np.array([4, 180, 156]) # 适用于橙色乒乓球4<=h<=32 0 2 76400725 upper="np.array([32," 255, 255]) targetpos_x="0" # 颜色检测得到的x坐标 targetpos_y="0" 颜色检测得到的y坐标 lastpos_x="0" 上一帧图像颜色检测得到的x坐标 lastpos_y="0" 上一帧图像颜色检测得到的y坐标 lastarea="0" hough_x="0" 霍夫圆检测得到的x坐标 hough_y="0" 霍夫圆检测得到的y坐标 colorxs="[]" 这些是用来存储x,y坐标的列表,便于后期写入文件 colorys="[]" houghxs="[]" houghys="[]" while true: _, img="cap.read()" 霍夫圆检测前的处理start b, g, r="cv2.split(img)" 分离三个颜色 将红色与蓝色转换为int16,为了后期做差 b="np.int16(b)" r_minus_b="r" - 红色通道减去蓝色通道,得到r_minus_b + abs(r_minus_b)) r_minus_b中小于0的全部转换为0 将数据类型转换回uint8 霍夫圆检测前的处理end imghough="img.copy()" 用于绘制识别结果和输出 imghsv="cv2.cvtColor(img," cv2.color_bgr2hsv) imgmask="cv2.inRange(imgHsv," lower, upper) 获取遮罩 imgoutput="cv2.bitwise_and(img," img, mask="imgMask)" contours, hierarchy="cv2.findContours(imgMask," cv2.retr_external, cv2.chain_approx_none) 查找轮廓 https: blog.csdn.net laobai1015 article details cv_retr_external 只检测最外围轮廓 rete_free cv_chain_approx_none 保存物体边界上所有连续的轮廓点到contours向量内 chain_approx_simple print(np.array(contours).shape) #查看提取的轮廓数量 cv2.color_gray2bgr) 转换后,后期才能够与原画面拼接,否则与原图维数不同 下面的代码查找包围框,并绘制 x, y, w, h="0," 0, for cnt in contours: area="cv2.contourArea(cnt)" if> 300:
print("area", area)
x, y, w, h = cv2.boundingRect(cnt)
lastarea = area
lastPos_x = targetPos_x
lastPos_y = targetPos_y
targetPos_x = int(x + w / 2)
targetPos_y = int(y + h / 2)
print("
y_threshold):
# 球在左下,向右下方后退
car_back()
pwm1.ChangeDutyCycle(20 + abs(x_delta) / 20)
pwm2.ChangeDutyCycle(0)
else:
# 球在左上、左中,向左上方前进
car_forward()
pwm1.ChangeDutyCycle(0)
pwm2.ChangeDutyCycle(20 + abs(x_delta) / 20)
else:
# 球在右边
if (y_delta > y_threshold):
# 球在右下,向左下方后退
car_back()
pwm1.ChangeDutyCycle(0)
pwm2.ChangeDutyCycle(20 + x_delta / 20)
else:
# 球在右上、右中,向右上方前进
car_forward()
pwm1.ChangeDutyCycle(20 + x_delta / 20)
pwm2.ChangeDutyCycle(0)
if cv2.waitKey(pulse_ms) & 0xFF == ord('q'): # 按下“q”推出(英文输入法)
print("Quit\n")
break
cap.release()
cv2.destroyAllWindows()
```
> 将图像转换成HSV
>
> 
>
> 
## 1.2 图像结果


## 1.3 结果分析
我们最终没有选择使用霍夫检测,因为霍夫检测虽然在不太明亮的环境下检测效果好,但是当检测物体运动之后,检测效果很差,而只用色差的方法寻找边缘,能够很快的反应,它的缺点只有受光线影响,光照越强,检测效果越好。
# 4 红外避障
太简单了,就只放代码
```python
import RPi.GPIO as gpio
import time
# 定义引脚
pin1 = 12 # 左正
pin2 = 16 # 左反
pin3 = 18 # 右正
pin4 = 22 # 右反
ENA = 38
ENB = 40
GPIO_Infrared_left = 29
GPIO_Infrared_right = 31
gpio.setwarnings(False)
# 设置gpio口为BOARD编号规范
gpio.setmode(gpio.BOARD)
# 设置gpio口为输出
gpio.setup(pin1, gpio.OUT)
gpio.setup(pin2, gpio.OUT)
gpio.setup(pin3, gpio.OUT)
gpio.setup(pin4, gpio.OUT)
gpio.setup(ENA, gpio.OUT)
gpio.setup(ENB, gpio.OUT)
gpio.setup(GPIO_Infrared_left, gpio.IN)
gpio.setup(GPIO_Infrared_right, gpio.IN)
# 设置PWM波,频率为50Hz
pwm1 = gpio.PWM(ENA, 50)
pwm2 = gpio.PWM(ENB, 50)
pwm1.start(0)
pwm2.start(0)
def car_forward(): # 定义前进函数
gpio.output(pin1, gpio.HIGH) # 将pin1接口设置为高电压
gpio.output(pin2, gpio.LOW) # 将pin2接口设置为低电压
gpio.output(pin3, gpio.HIGH) # 将pin3接口设置为高电压
gpio.output(pin4, gpio.LOW) # 将pin4接口设置为低电压
def car_back(): # 定义后退函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_left(): # 定义左转函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.HIGH)
gpio.output(pin4, gpio.LOW)
def car_right(): # 定义右转函数
gpio.output(pin1, gpio.HIGH)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_stop(): # 定义停止函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.LOW)
def InfraredMeasure():
left_measure = gpio.input(GPIO_Infrared_left) # if there is an obstacle, GPIO will become 0; else, GPIO_input = 1;
right_measure = gpio.input(GPIO_Infrared_right)
return [left_measure, right_measure]
def avoidance(left,right):
if(left==0 and right !=0 ):
car_back()
pwm1.ChangeDutyCycle(25)
pwm2.ChangeDutyCycle(25)
time.sleep(1)
car_right()
pwm1.ChangeDutyCycle(40)
pwm2.ChangeDutyCycle(40)
print("detect obstacles in the left!")
time.sleep(1)
elif(left==0 and right ==0):
car_back()
pwm1.ChangeDutyCycle(40)
pwm2.ChangeDutyCycle(40)
print("detect obstacles in the left and right!")
time.sleep(1)
elif(left == 1 and right ==0):
car_back()
pwm1.ChangeDutyCycle(25)
pwm2.ChangeDutyCycle(25)
time.sleep(2)
car_left()
pwm1.ChangeDutyCycle(40)
pwm2.ChangeDutyCycle(40)
print("detect obstacles in the right!")
time.sleep(1)
else:
car_forward()
pwm1.ChangeDutyCycle(30)
pwm2.ChangeDutyCycle(30)
def loop():
while True:
car_forward()
pwm1.ChangeDutyCycle(30)
pwm2.ChangeDutyCycle(30)
[left, right] = InfraredMeasure()
print(left,right)
avoidance(left,right)
def destroy():
gpio.cleanup()
try:
loop()
except KeyboardInterrupt:
destroy()
```
# 5 超声波避障
``` python
import RPi.GPIO as gpio
import time
# 定义引脚
pin1 = 12 # 左正
pin2 = 16 # 左反
pin3 = 18 # 右正
pin4 = 22 # 右反
ENA = 38
ENB = 40
TRIG = 13 # send-pin
ECHO = 15 # receive-pin
# 设置gpio口为BOARD编号规范
gpio.setmode(gpio.BOARD)
# 设置gpio口为输出
gpio.setup(pin1, gpio.OUT)
gpio.setup(pin2, gpio.OUT)
gpio.setup(pin3, gpio.OUT)
gpio.setup(pin4, gpio.OUT)
gpio.setup(ENA, gpio.OUT)
gpio.setup(ENB, gpio.OUT)
# 设置PWM波,频率为50Hz
pwm1 = gpio.PWM(ENA, 50)
pwm2 = gpio.PWM(ENB, 50)
pwm1.start(0)
pwm2.start(0)
def car_forward(): # 定义前进函数
gpio.output(pin1, gpio.HIGH) # 将pin1接口设置为高电压
gpio.output(pin2, gpio.LOW) # 将pin2接口设置为低电压
gpio.output(pin3, gpio.HIGH) # 将pin3接口设置为高电压
gpio.output(pin4, gpio.LOW) # 将pin4接口设置为低电压
def car_back(): # 定义后退函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_left(): # 定义左转函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.HIGH)
gpio.output(pin3, gpio.HIGH)
gpio.output(pin4, gpio.LOW)
def car_right(): # 定义右转函数
gpio.output(pin1, gpio.HIGH)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.HIGH)
def car_stop(): # 定义停止函数
gpio.output(pin1, gpio.LOW)
gpio.output(pin2, gpio.LOW)
gpio.output(pin3, gpio.LOW)
gpio.output(pin4, gpio.LOW)
def setup():
gpio.setup(TRIG, gpio.OUT, initial=gpio.LOW)
gpio.setup(ECHO, gpio.IN)
gpio.setwarnings(False) # 关闭警告
def distance():
gpio.output(TRIG, 1) # 给Trig一个10US以上的高电平
time.sleep(0.00001)
gpio.output(TRIG, 0)
# 等待低电平结束,然后记录时间
while gpio.input(ECHO) == 0: # 捕捉 echo 端输出上升沿
pass
time1 = time.time()
# 等待高电平结束,然后记录时间
while gpio.input(ECHO) == 1: # 捕捉 echo 端输出下降沿
pass
time2 = time.time()
during = time2 - time1
# ECHO高电平时刻时间减去低电平时刻时间,所得时间为超声波传播时间
return during * 340 / 2 * 100
# 超声波传播速度为340m/s,最后单位米换算为厘米,所以乘以100
def loop():
while True:
dis = distance()
print(dis, "cm\n")
# print dis, 'cm'
# print ''
time.sleep(0.3)
car_forward()
pwm1.ChangeDutyCycle(30)
pwm2.ChangeDutyCycle(30)
if (dis < 30):
car_back()
pwm1.ChangeDutyCycle(40)
pwm2.ChangeDutyCycle(40)
time.sleep(1)
car_forward()
pwm1.ChangeDutyCycle(40)
pwm2.ChangeDutyCycle(0)
time.sleep(1)
def destroy():
gpio.cleanup()
if __name__ == "__main__":
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
```

