RVO2 Library: Reciprocal Collision Avoidance for Real-Time Multi-Agent Simulation
一些要点
- 二维环境
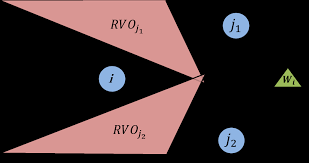
- optimal reciprocal collision avoidance(ORCA)公式
- 多个独立的移动机器人或代理需要在没有代理之间通信的情况下在公共工作空间中移动时避免相互碰撞。
- 让每个代理承担避免成对碰撞的一半责任。

- 每个无人机的最优动作简化为低维度线性问题,即凸优化问题。让每个代理承担避免成对碰撞的一半责任。

- 这个算法可以避免agents出现震荡行为。
- user指定了静止的障碍物和agents初速度。
- 如果使用OPENMP可以利用多个处理器并行模拟。
论文解读
解读,解读个p,啥也不会,直接看(59条消息) ORCA(RVO2)算法优化整理版_u012740992的专栏-CSDN博客_orca算法
一些网址:
论文笔记《Reciprocal Velocity Obstacles for Real-Time Multi-Agent Navigation》
cite:
@Inbook{Furrer2016, author="Furrer, Fadri and Burri, Michael and Achtelik, Markus and Siegwart, Roland", editor="Koubaa, Anis", chapter="RotorS---A Modular Gazebo MAV Simulator Framework", title="Robot Operating System (ROS): The Complete Reference (Volume 1)", year="2016", publisher="Springer International Publishing", address="Cham", pages="595--625", isbn="978-3-319-26054-9", doi="10.1007/978-3-319-26054-9_23", url="http://dx.doi.org/10.1007/978-3-319-26054-9_23" }

