浙江大学FAST 的EGO-Planner

摘要
基于梯度规划广泛使用于local planning,其中欧几里德符号距离场(ESDF)欧几里德符号距离场(ESDF)对梯度幅度和方向有着非常重要的作用。其中ESDF是可以很方便地对障碍物进行距离和梯度信息的查询,对空中机器人的在线运动规划具有重要意义。如何快速地生成ESDF地图是进行实时运动规划的重点。
但是计算这么一个field是非常冗余的,因为轨迹优化过程仅仅包含一个非常有限的ESDF范围为的子空间。借此,一个ESDF-free 的基于梯度planning框架提出,显著的减少了计算时间,最主要的提升是在惩罚函数中的碰撞项通过比较碰撞轨迹和没有碰撞的路径得出,产生的障碍信息将会被储存起来如果这个路径(trajectory)击中了新的障碍,从而让必要的障碍信息被提取出来。之后,如果动态可行性被违背,我们加长时间分配。一个各向异性的曲线拟合算法被介绍到轨迹的高级导数中,并保持原始的形状,Bechmark比较和真实世界的实验证实了它的鲁棒性和高性能。
介绍
背景:传统使用的基于梯度planners依赖于提前构造的ESDF地图去评估梯度幅值和方向,同时使用多条优化去生成一个本地最优的解决措施,即便这个优化项目能够很好的收敛,但是前期的ESDF构造很麻烦。
ESDF构造方法:
- 增量计算(incremental global updating ones)
- 批量本地计算(batch local calculation ones)
但是没有一种是专注于路径本身的,所以当前的基于ESDF方法并没有直接服务于路径优化。
当前算法:包含仔细的工程考虑让算法变得鲁棒和轻量。由基于梯度的样条优化和一个后提纯的过程构成。
- 首先,使用丝滑碰撞和动态可行性去优化路径,通过将障碍物内的轨迹与引导的无碰撞路径进行比较来模拟碰撞成本。
- 之后,将力投射到碰撞轨迹上并生成估计的梯度以将轨迹包裹在障碍物之外 。
- 在优化过程中,这个轨迹会反弹几次在障碍物和最后的终止在安全的区域
如果产生的路径违背了动态限制(由于不知道原因的时间分配),后提纯过程被激活(refinement) 。
比较
- 传统的ESDF算法缺点:在计算梯度幅值和方向的时候往往会将全地图数据提前输入计算(pre-computed ESDF),这样的计算方式是多余的,而且会大大提高计算机的运算时间,对于轨迹优化而言灵活性不高。
- EGO算法优点:轻量级而且鲁棒性强。
优化算法比较
比较内容有
- success rate成功率(收敛速率)
- computed time计算时间
- number of function of obejects estimation目标函数评估数量
三种算法
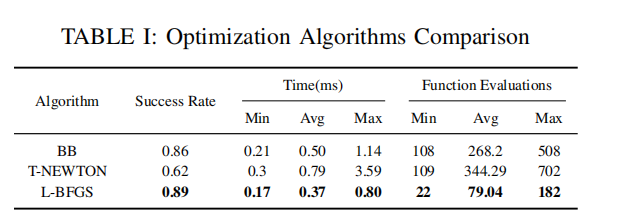
Barzilai-Borwein(BB)。
limited-memory BFGS(L-BFGS)使用二次taylor展开,taylor展开阶次越高越精确。
truncated Newton(T-Newton)弦截牛顿法。
conclusion:L-BFGS算法表现最好。
轨迹生成算法比较
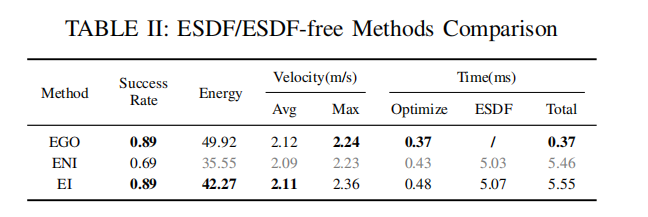
EGO算法成功率高,但是能量消耗大,因为它会产生更多的控制点,导致对无人机的控制变多,但是在计算时间上有着卓越的表现。
EI(ESDF- based)成功率高
EVI(ESDF-free)成功率对比上面两种方法最低,但是所需要的能量最少,但是EVI只能在一些比较没有挑战性的情况下执行。
Multiple Planners Comparison
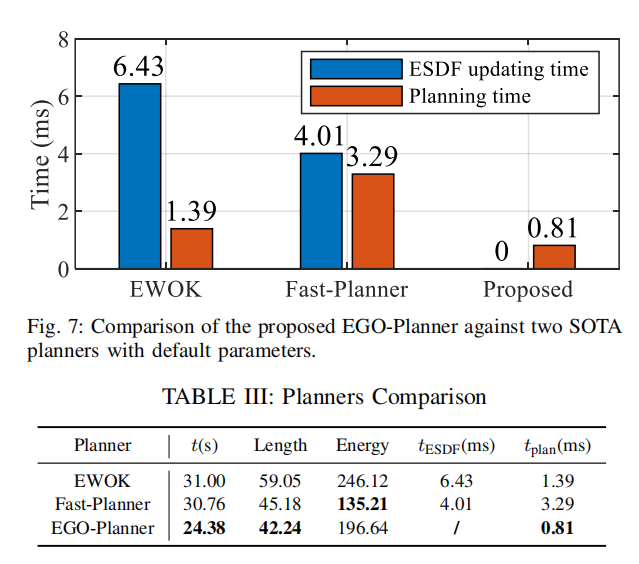
EWOK
Fast-Planner
本文中的提高的planner方法
conclusion:本文提出的planner能够成功达到最少的飞行时间和飞行长度,但是需要更多的能量,可能是因为基于基诺动力学(kinodynamics)的路径搜索的原因,但是本文的方法具有最少的计算时间。
EGO方法的缺点
只能使用于相对于静态的环境中(velocity<0.5m/s)

